Entraînement de Yolo V7 sur des données personnelles
Vous avez très envie d'utiliser Yolo V7 sur votre problématique de reconnaissance d'objet ou de segmentation mais vous n'avez pas de gros ordinateur avec une groooosse carte graphique pour faire de grooooooooooos calculs d'optimisation de poids. Pas de panique, il y a des solutions et on vous en propose une ici.
Utilisation du GPU
Le petite magicien qui rend possible l'entraînement des modèles de deep learning très profonds, c'est lui : le GPU. Cool mais déjà c'est quoi ? Et puis comment je fais si j'en ai pas ?
Le GPU
Une unité de traitement graphique ou GPU (Graphics Processing Unit) est une puce informatique pour traiter les tâches de rendu graphique. Les GPU sont conçus pour effectuer de nombreux calculs simultanément, ce qui les rend particulièrement efficaces pour le rendu graphiques 2D/3D ou le traitement de vidéos mais pas seulement. Le GPU fonctionne conjointement avec le processeur (CPU) et permet, en tournant spécialement pour le rendu images, de libérer de la puissance de traitement pour le CPU qui peut se consacrer aux autres tâches sans limiter les performances de la carte graphique.
Le GPU est généralement disposé sur la carte graphique (d'où la confusion parfois entre les 2), mais pas nécessairement. En effet la puce GPU peut être intégrée à un CPU sur le même circuit, sur une carte graphique ou dans la carte mère d'un ordinateur ou d'un serveur.
GPU, CPU, JSUIPERDU...
Un GPU est plus efficace qu'un CPU pour le rendu d'images grâce à son architecture de traitement parallèle lui permettant d'effectuer de nombreux calculs simultanément. Un seul CPU ne dispose pas de cette fonctionnalité (bien que ce soit possible avec des processeurs multicœurs). En revanche un CPU a une fréquence plus élevée et peut effectuer un calcul plus rapidement qu'un GPU.
Pour résumer, le GPU est conçu pour le parallélisme des données et pour appliquer la même opération à plusieurs éléments de données (SIMD pour Single Instruction to Multiple Data) tandis qu'un CPU est conçu pour le parallélisme des tâches et l'exécution de différentes opérations non nécessairement liées.
Si votre ordinateur est forcément équipé d'un CPU, il n'a pas nécessairement de GPU puisque le chipset de la carte mère peut gérer le rendu graphique (beaucoup moins bien qu'une carte graphique certes).
GPU et Deep Learning
"Bon ok, je suis toujours pas spécialiste, mais je vois le principe. Par contre, on était pas sur YoloV7 nous ?"
YoloV7 est un réseau de neurones à convolution qui a quasiment 37 millions de paramètres...lorsque vous souhaitez utiliser le modèle déjà entraîné sur le jeu de données COCO, pas de problèmes de hardware, ça fonctionnera sans ressources supplémentaires. Si par contre vous voulez ré-entraîner le modèle sur vos données, là ça se complique et si vous n'avez pas de GPU, vous avez intérêt à avoir énormément de temps devant vous, et d'ailleurs ça ne suffira même pas, car alors c'est la mémoire qui vous manquera.
Sans entrer dans les détails de l'optimisation de réseau de neurones, les opérations à effectuer sont des calculs matriciels pas tellement complexes mais répétitifs et surtout, extrêmement nombreux. La parallélisation de ces opérations sur un GPU est donc idéale et nécessaire pour optimiser le réseau dans un temps viable.
Les services de GPU cloud
"On y voit un peu plus clair...mais comment on fait quand on en a pas ?"
Puisqu'on a pas les capacités localement, on va le faire à distance grâce aux services Cloud qui proposent du GPU. Ils sont nombreux (Linode, Paperspace, Google Cloud GPUs, Elastic GPU Service, Azure N series, IBM Cloud, AWS and NVIDIA, OVHcloud, etc...) mais on va s'en tenir a un : Paperspace. L'intérêt est d'utiliser Paperspace Gradient qui facilite la création de machine avec des templates intégrés (au hasard, PyTorch), l'utilisation et l'entraînement de modèles à parir de notebooks. Si on le souhaite, on peut louer directement du GPU avec Paperspace CORE.
Cas pratique : la reconnaissance de déchets
L'objectif est d'entraîner le modèle Yolo V7 à identifier et reconnaître des déchets. On utilisera pour cela le dataset TACO et on va faire l'entraînement sur Paperspace Gradient.
Gradient Paperspace
Que ce soit clair, on n'a pas de parts dans Paperspace. C'est juste que c'est un des fournisseurs de GPU cloud et que Gradient est bien pensé pour des problématiques Machine Learning. Évidemment, si vous souhaitez utiliser un autre fournisseur et y faire tourner ce notebook, c'est tout à fait possible, il faudra juste installer sur votre VM l'ensemble des dépendances nécessaires et notamment jupyter. Ceci étant dit, voilà comment faire avec Gradient :
- Créez un compte sur Paperspace
- Créez un projet
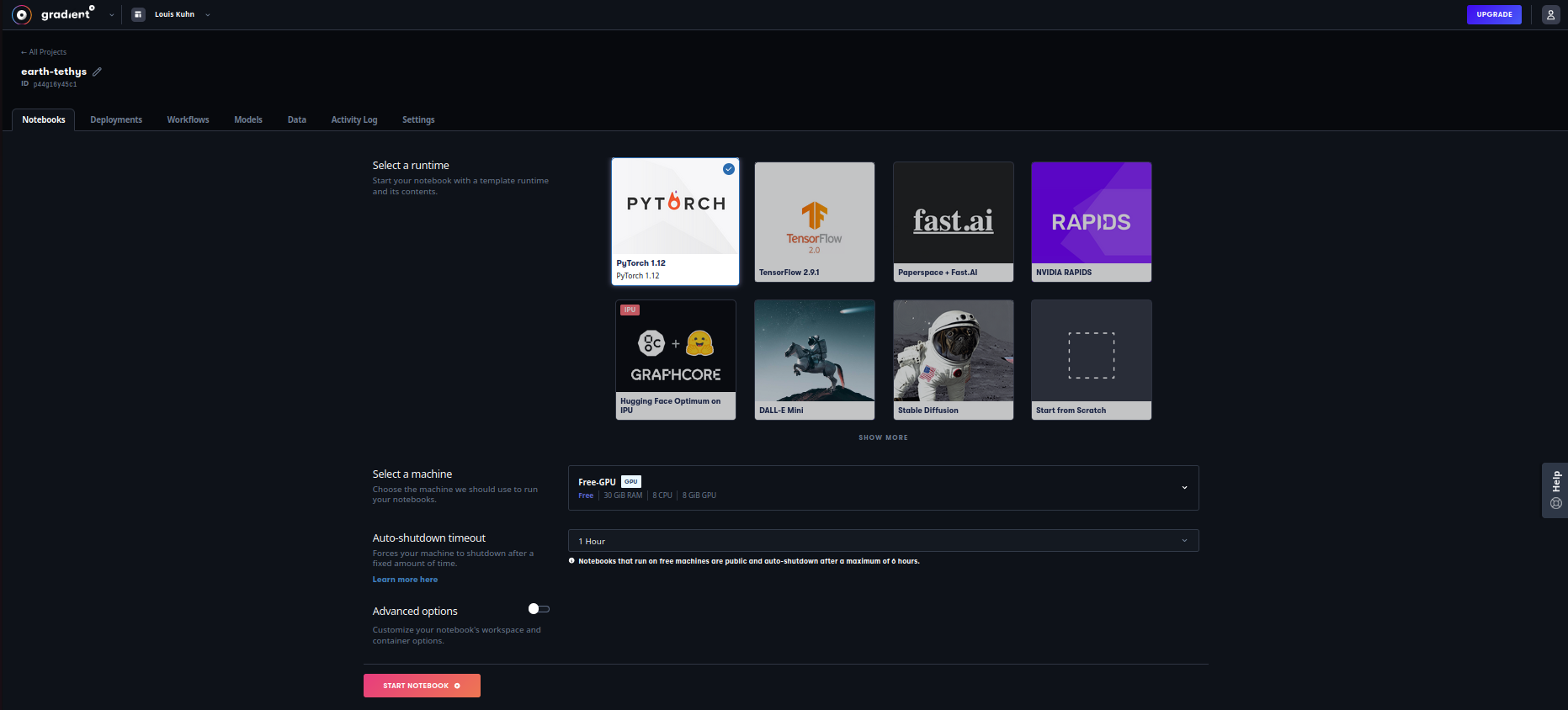
- Dans votre projet, créez un notebook en choisissant un template (PyTorch par exemple ou bien From Scratch) et un type de GPU selon votre compte et la disponibilité
- Bienvenus sur votre VM avec son GPU associé qui doit avoir le statut "Running", vous pouvez uploader un notebook par exemple celui-ci
On ne s'étendra pas plus sur cette partie qui est spécifique à Gradient et pas aux services de GPU cloud en général. On vous laisse creuser si vous le souhaitez mais considérons à partir de maintenant que tout le code qui suit est exécuté directement dans l'IDE Jupyter Lab de notre VM Gradient (Jupyter Lab est disponible dans le barre d'outils à gauche).
Le dataset TACO
On ne détaillera pas ici le traitement du dataset car ce n'est pas l'objet de cette note. En revanche, le notebook TACO_dataset reprend l'ensemble des opérations concernant le jeu de données, à savoir :
- clonage du repo TACO
- installation du
requirements.txt - récupération des images annotées au format YOLO
- exploration du dataset avec les fonctions disponibles dans le script
cocoviz.py - transformation des annotations du format COCO au format YOLO. Encore une fois, on n'explicite pas ici cette transformation mais quelques éléments toutefois : COCO utilise un seul fichier json dans lequel il stocke toutes les annotations de toutes les images avec des positions absolues sur les images alors que YOLO utilise des positions relatives et normalisées dans un fichier txt par image
- modification des classes pour ne garder que les super-catégories : ce n'est pas optimal pour la détection d'objets mais ça permet de simplifier un peu ce cas pratique théorique où le pouvoir prédictif de notre modèle n'a pas une grande importance
Vous pouvez uploader ce notebook TACO_dataset sur Gradient et l'exécuter directement pour télécharger les images, annotations et effectuer l'ensemble des prétraitements. À la fin de l'exécution, vous disposerez donc, sur votre VM, des données prêtes (ou presque) à être utilisées pour l'entraînement de YoloV7. On y vient.
L'entraînement de YoloV7
Récupération du code de YoloV7
On clone directement le dépôt de yolov7 pour pouvoir réentraîner le modèle sur nos données. Bien noter que le repo sera cloné sur votre VM Gradient d'où vous exécutez ce notebook.
!git clone https://github.com/WongKinYiu/yolov7.git
Clonage dans 'yolov7'...
remote: Enumerating objects: 1127, done.
remote: Counting objects: 100% (29/29), done.
remote: Compressing objects: 100% (25/25), done.
remote: Total 1127 (delta 12), reused 14 (delta 4), pack-reused 1098
Réception d'objets: 100% (1127/1127), 69.96 Mio | 16.98 Mio/s, fait.
Résolution des deltas: 100% (522/522), fait.
On installe ensuite les dépendances nécessaires de YoloV7. Selon la machine GPU choisie sur Gradient, vous pourrez avoir besoin ou pas de downgrader les versions de Torch et Torchvision. Ici c'était le cas avec une VM A4000.
!pip install -r ./yolov7/requirements.txt
!pip install setuptools==59.5.0
!pip install torchvision==0.11.3+cu111 -f https://download.pytorch.org/whl/cu111/torch_stable.html
Requirement already satisfied: matplotlib>=3.2.2 in /usr/local/lib/python3.9/dist-packages (from -r ./yolov7/requirements.txt (line 4)) (3.5.2)
Requirement already satisfied: numpy>=1.18.5 in /usr/local/lib/python3.9/dist-packages (from -r ./yolov7/requirements.txt (line 5)) (1.23.1)
Requirement already satisfied: opencv-python>=4.1.1 in /usr/local/lib/python3.9/dist-packages (from -r ./yolov7/requirements.txt (line 6)) (4.6.0.66)
Requirement already satisfied: Pillow>=7.1.2 in /usr/local/lib/python3.9/dist-packages (from -r ./yolov7/requirements.txt (line 7)) (9.2.0)
Requirement already satisfied: PyYAML>=5.3.1 in /usr/local/lib/python3.9/dist-packages (from -r ./yolov7/requirements.txt (line 8)) (5.4.1)
[............]
WARNING: Running pip as the 'root' user can result in broken permissions and conflicting behaviour with the system package manager. It is recommended to use a virtual environment instead: https://pip.pypa.io/warnings/venv
Looking in links: https://download.pytorch.org/whl/cu111/torch_stable.html
Collecting torchvision==0.11.3+cu111
Downloading https://download.pytorch.org/whl/cu111/torchvision-0.11.3%2Bcu111-cp39-cp39-linux_x86_64.whl (24.5 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 24.5/24.5 MB 63.2 MB/s eta m0:00:0000:0100:01
Requirement already satisfied: pillow!=8.3.0,>=5.3.0 in /usr/local/lib/python3.9/dist-packages (from torchvision==0.11.3+cu111) (9.2.0)
Collecting torch==1.10.2
Downloading https://download.pytorch.org/whl/cu111/torch-1.10.2%2Bcu111-cp39-cp39-linux_x86_64.whl (2137.7 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 2.1/2.1 GB 1.2 MB/s eta m0:00:00:00:0100:02m
Requirement already satisfied: numpy in /usr/local/lib/python3.9/dist-packages (from torchvision==0.11.3+cu111) (1.23.1)
Requirement already satisfied: typing-extensions in /usr/local/lib/python3.9/dist-packages (from torch==1.10.2->torchvision==0.11.3+cu111) (4.3.0)
Installing collected packages: torch, torchvision
Attempting uninstall: torch
Found existing installation: torch 1.12.1
Uninstalling torch-1.12.1:
Successfully uninstalled torch-1.12.1
Attempting uninstall: torchvision
Found existing installation: torchvision 0.13.1
Uninstalling torchvision-0.13.1:
Successfully uninstalled torchvision-0.13.1
ERROR: pip's dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conflicts.
torchaudio 0.12.0+cu116 requires torch==1.12.0, but you have torch 1.10.2+cu111 which is incompatible.
Successfully installed torch-1.10.2+cu111 torchvision-0.11.3+cu111
WARNING: Running pip as the 'root' user can result in broken permissions and conflicting behaviour with the system package manager. It is recommended to use a virtual environment instead: https://pip.pypa.io/warnings/venv
À ce stade, vous avez vos données ainsi que le code et les dépendances pour pouvoir l'utiliser. Il n'y donc plus qu'à entraîner.
"Ah oui mais non mon petit bonhomme, on va pas entraîner un modèle sur toutes nos données, sans faire de découpage échantillons entraînement/validation/test" me direz-vous...
Train test split
Si elle n'est pas au coeur de notre article, le train test split reste une étape fondamentale pour l'entraînement de tout modèle de machine learning. On présente donc la stratégie utilisée, une méthode "à la main" à partir des noms d'images en créant des dossiers associés à chaque sous-échantillon. On met directement les datasets train, val, test ainsi que le fichier .yaml associé dans le repo yolov7 pour l'entraînement puisque c'est à partir de ce repo, en utilisant le script train.py qu'on va réentrainer le modèle YoloV7.
Petite note en passant : le fichier .yaml dont on parle est le fichier de configuration de l'entraînement. Il contient comme informations les chemins des différents datasets ainsi que le nombre de catégories à identifier et leur nom. On le crée directement dans la cellule ci-dessous.
import json
import os
import random
from tqdm import tqdm
import shutil
import datetime
import re
# Split dataset
# read json file
with open('./TACO/data/images/annotations_wo_subdir.json', 'r+') as file:
json_file = json.load(file)
# create directories (with replacement if exists)
for dirname in ['train', 'val', 'test']:
dirpath = f"./yolov7/data/TACOpoly/{dirname}"
if os.path.exists(dirpath):
shutil.rmtree(dirpath)
os.makedirs(dirpath + '/images')
os.makedirs(dirpath + '/labels')
# create yaml file (with replacement if exists)
cats = [cat['name'] for cat in json_file['categories']]
with open('./yolov7/data/TACOpoly.yaml', 'w') as f:
f.write(
f"""train: ./data/TACOpoly/train/images
val: ./data/TACOpoly/val/images
test: ./data/TACOpoly/test/images
nc: {len(cats)}
names: {cats}""")
# read json annotations file
with open('./TACO/data/images/annotations_wo_subdir.json', 'r+') as file:
json_file = json.load(file)
# get images names and shuffle
img_names = [img['file_name'].split('.')[0] for img in json_file['images']]
random.shuffle(img_names)
# create a splitting dictionnary
split = {
'train' : img_names[:1200],
'val' : img_names[1200:1400],
'test' : img_names[1400:]
}
# copy each image and its label in the right directory
for setname, sample in split.items():
print(f"Copying images to {setname.upper()} directory")
for imgname in tqdm(sample):
shutil.copy(f"./TACO/data/images/{imgname}.jpg", f"./yolov7/data/TACOpoly/{setname}/images/{imgname}.jpg")
shutil.copy(f"./TACO/data/labels_poly/{imgname}.txt", f"./yolov7/data/TACOpoly/{setname}/labels/{imgname}.txt")
Copying images to TRAIN directory
100%|██████████| 1200/1200 [01:50<00:00, 10.84it/s]
Copying images to VAL directory
100%|██████████| 200/200 [00:17<00:00, 11.56it/s]
Copying images to TEST directory
100%|██████████| 100/100 [00:08<00:00, 11.31it/s]
Voilà, cette fois plus de contretemps, on est paré pour l'entraînement.
Entraînement
Pour gagner du temps, on ne va pas repartir de zéro avec des poids initiaux complétement aléatoires mais on va charger les poids d'un modèle pré-entraîné. On doit dans un premier temps télécharger ces poids puis lancer l'entraînement sur nos données. Pour cela, on se place dans le repo yolov7 et on télécharge les poids en question.
%cd /notebooks/yolov7
/notebooks/yolov7
if os.path.exists('yolov7_training.pt'):
print("Déjà téléchargé")
else:
!wget https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7_training.pt
Déjà téléchargé
La fonction get_last_weights ci-dessous n'est pas du tout nécessaire à l'entraînement de YoloV7 mais peut avoir son utilité. Je vous invite donc à regarder rapidement ce qu'elle fait sans pour autant vous y attarder.
Une petite explication quand même : les machines Gradient s'arrêtent automatiquement au bout de 6 heures ce qui n'est pas mal mais pas assez pour atteindre de bonnes performances du modèle. Il faudra donc relancer l'entraînement plusieurs fois pour atteindre un nombre d'époques suffisant. Deux stratégies sont possibles :
- la plus évidente : on lance dès le départ un entraînement avec un grand d'époques et si la machine se stoppe, alors il suffira de relancer l'entraînement avec l'option
--resumequi offre la possibilité de reprendre l'entraînement où il s'était arrêté (!python train.py --resume). Le problème de cette méthode est quetrain.pysauvegarde des poids intermédiaires tout au long de l'entraînement et que ces fichiers sont lourds. Il faudra donc supprimer en partie ces fichiers à la main avant de relancer l'entraînement pour éviter d'atteindre le plafond de stockage offert par Gradient. - un approche plus maîtrisée : on fait un nombre d'époques plus restreint dont on sait qu'il sera terminé en moins de 6 heures et on repart à chaque fois du meilleur poids du dernier entraînement. La fonction
get_last_weightsrécupère simplement ces meilleurs derniers poids. Cela va permettre de ne pas garder en mémoire les autres fichiers de poids en les supprimant dès la nouvelle série d'époques terminée.
def get_last_weights(modelname):
"""
This function retrieves the best weights from the last training in order to
restart new traing from those weights.
Parameters
----------
modelname : str
Name of the model (such as --name argument from Yolov7 train.py script).
This is the name looked for in the yolov7/runs/train directory.
nb_epochs : int
Number of epochs done per each training.
Returns
-------
str :
Path to weights used to initiate new training.
int :
Number of epochs already trained.
"""
# keep only directories containg modelname in their name
train_dirs = []
for dirname in os.listdir('/notebooks/yolov7/runs/train/'):
if modelname in dirname:
train_dirs.append(dirname)
train_dirs.sort()
# returns yolov7_training weights and 0 epochs if never trained
if len(train_dirs) == 0:
return 'yolov7_training.pt', 0
# else retrieve the last weights and compute number of epochs
# this assumes that the number of epochs is the same over each training
nmax = 0
for dirname in train_dirs:
if dirname.split(modelname)[-1] == '' :
dirmax = dirname
else:
n = int(dirname.split(modelname)[-1])
if n > nmax :
nmax = n
dirmax = dirname
return f"runs/train/{dirmax}/weights/best.pt"
Cette fois ça y est. C'est vraiment le moment de l'entraînement ! Pour ce qui concerne les différents paramètres passés en arguments de la commande python train.py, vous êtes cordialement conviés à regarder du côté de l'aide pour y voir plus clair. Allez, on arrête de bosser et on laisse le GPU transpirer un peu.
epochs_per_training = 150
init_weights = get_last_weights('TACOpoly')
start = datetime.datetime.now()
print(f"ENTRAÎNEMENT DÉBUTÉ À {start.strftime('%H:%M')} AVEC LES POIDS INITIAUX {init_weights}")
print(f"_________________________________________________________________")
!python train.py --workers 8 --device 0 --batch-size 16 --data data/TACOpoly.yaml --img 640 640 \
--cfg cfg/training/yolov7.yaml --weights {init_weights} --name TACOpoly \
--hyp data/hyp.scratch.custom.yaml --epochs {epochs_per_training}
print(f"_________________________________________________________________")
print(f"DURÉE DE L'ENTRAÎNEMENT : {datetime.datetime.now() - start}")
ENTRAÎNEMENT DÉBUTÉ À 10:24 AVEC LES POIDS INITIAUX runs/train/TACOpoly7/weights/best.pt
_________________________________________________________________
YOLOR 🚀 v0.1-115-g072f76c torch 1.10.2+cu111 CUDA:0 (NVIDIA RTX A4000, 16117.3125MB)
Namespace(weights='runs/train/TACOpoly7/weights/best.pt', cfg='cfg/training/yolov7.yaml', data='data/TACOpoly.yaml', hyp='data/hyp.scratch.custom.yaml', epochs=150, batch_size=16, img_size=[640, 640], rect=False, resume=False, nosave=False, notest=False, noautoanchor=False, evolve=False, bucket='', cache_images=False, image_weights=False, device='0', multi_scale=False, single_cls=False, adam=False, sync_bn=False, local_rank=-1, workers=8, project='runs/train', entity=None, name='TACOpoly', exist_ok=False, quad=False, linear_lr=False, label_smoothing=0.0, upload_dataset=False, bbox_interval=-1, save_period=-1, artifact_alias='latest', freeze=[0], v5_metric=False, world_size=1, global_rank=-1, save_dir='runs/train/TACOpoly8', total_batch_size=16)
[............]
Epoch gpu_mem box obj cls total labels img_size
145/149 11G 0.008686 0.003024 0.0004638 0.01217 82 640
Class Images Labels P R mAP@.5
all 200 648 0.43 0.204 0.194 0.162
Epoch gpu_mem box obj cls total labels img_size
146/149 11G 0.008719 0.003078 0.0004409 0.01224 52 640
Class Images Labels P R mAP@.5
all 200 648 0.555 0.18 0.193 0.16
Epoch gpu_mem box obj cls total labels img_size
147/149 11G 0.008701 0.003087 0.0005799 0.01237 89 640
Class Images Labels P R mAP@.5
all 200 648 0.427 0.212 0.193 0.161
Epoch gpu_mem box obj cls total labels img_size
148/149 11G 0.00864 0.003092 0.0004653 0.0122 73 640
Class Images Labels P R mAP@.5
all 200 648 0.621 0.174 0.191 0.159
Epoch gpu_mem box obj cls total labels img_size
149/149 11G 0.008513 0.003076 0.0005339 0.01212 70 640
Class Images Labels P R mAP@.5
all 200 648 0.626 0.171 0.194 0.16
Aluminium foil 200 11 0.919 0.545 0.565 0.556
Blister pack 200 1 1 0 0 0
Bottle 200 54 0.655 0.574 0.628 0.535
Bottle cap 200 32 0.579 0.281 0.416 0.317
Broken glass 200 15 1 0 0 0
Can 200 29 0.457 0.552 0.473 0.428
Carton 200 35 0.454 0.2 0.22 0.16
Cup 200 26 0.53 0.269 0.294 0.215
Food waste 200 2 1 0 0 0
Glass jar 200 1 1 0 0 0
Lid 200 18 0.782 0.333 0.353 0.333
Other plastic 200 57 0.325 0.0702 0.0748 0.0585
Paper 200 21 0.375 0.143 0.128 0.11
Paper bag 200 5 0.469 0.4 0.361 0.345
Plastic bag & wrapper 200 132 0.498 0.308 0.34 0.273
Plastic container 200 8 0.364 0.25 0.292 0.281
Plastic glooves 200 1 1 0 0 0
Plastic utensils 200 3 0 0 0.0198 0.0198
Pop tab 200 8 0.452 0.25 0.284 0.224
Rope & strings 200 3 0 0 0.0953 0.0695
Scrap metal 200 7 1 0 0 0
Shoe 200 1 1 0 0 0
Squeezable tube 200 1 1 0 0.0476 0.0476
Straw 200 41 0.697 0.0976 0.141 0.0793
Styrofoam piece 200 9 0.231 0.111 0.158 0.0891
Unlabeled litter 200 59 0.418 0.0735 0.113 0.0811
Cigarette 200 68 0.694 0.162 0.236 0.11
150 epochs completed in 4.421 hours.
Optimizer stripped from runs/train/TACOpoly8/weights/last.pt, 75.1MB
Optimizer stripped from runs/train/TACOpoly8/weights/best.pt, 75.1MB
_________________________________________________________________
DURÉE DE L'ENTRAÎNEMENT : 4:26:29.827454
Comme évoqué précédement, si l'entraînement s'est bien terminé sans erreur, on peut supprimer le contenu du dossier de l'entraînement précédent pour éviter de surcharger le stockage du compte Paperspace Gradient. Il faut en revanche conserver le dossier, même vide, car sinon les nouveaux entraînement seront stockés dans ces dossiers-là et on va se perdre dans quels sont les derniers poids (c'est dû à la méthode d'indentation des noms de dossiers dans le code source de yolov7).
last_weights = get_last_weights('TACOpoly')
if (init_weights != 'yolov7_training.pt') & os.path.exists(last_weights):
dir_to_empty = os.path.dirname(os.path.dirname(init_weights))
shutil.rmtree(dir_to_empty)
os.makedirs(dir_to_empty)
Ça y est, enfin, après un certain nombre d'époques (entre 600 et 1000 à la grosse louche), votre modèle devrait être suffisamment performant et vous n'avez plus qu'à récupérer les poids best.pt de votre dernier entraînement pour faire votre inférence. Bonne chance et amusez-vous bien !
C'est la fin de cet article! N'hésitez pas à visiter notre site et à nous suivre sur Twitter et Linkedin. Pour retrouver l'ensemble du code ayant servi à générer cette note, vous pouvez vous rendre sur le github de Statoscop.